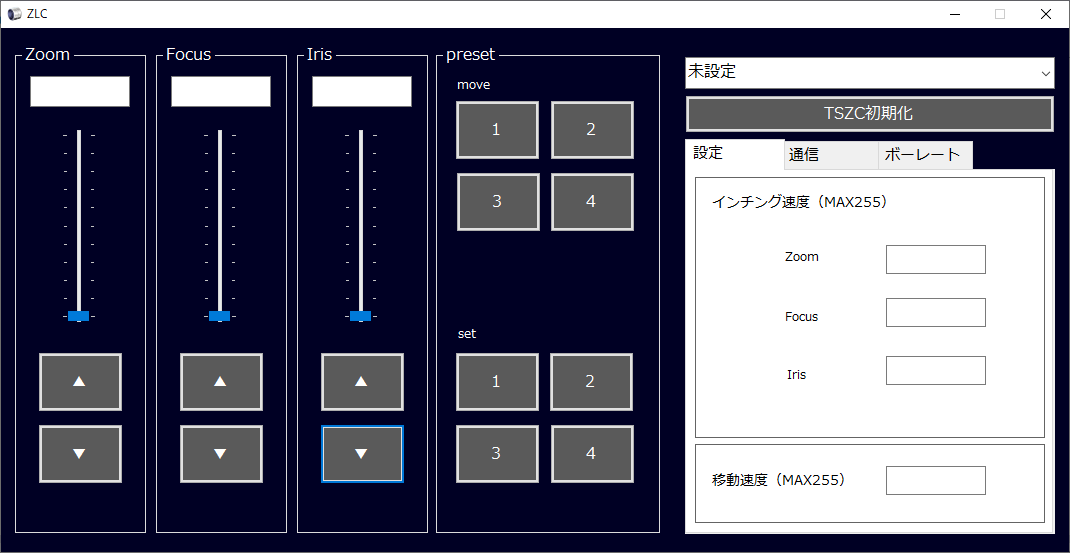
ZLCにボーレート選択機能、ボーレート相違時の接続機能が追加されました。
◆追加機能
- ボーレート選択機能
- ボーレート相違時接続機能
- 応答性の向上
 Firefly DLの開発環境構築が分からない。
Firefly DLの開発環境構築が分からない。
Firefly DLで最初から結果を出したい。
そんな方たちに向けて、tesbitがすべてをセットにした
開発環境を提供いたします。
弊社ではお客様に安定した運用をしていただくために、
SuperMicro社ワークステーションを、
弊社スペックで構築し提供しています。
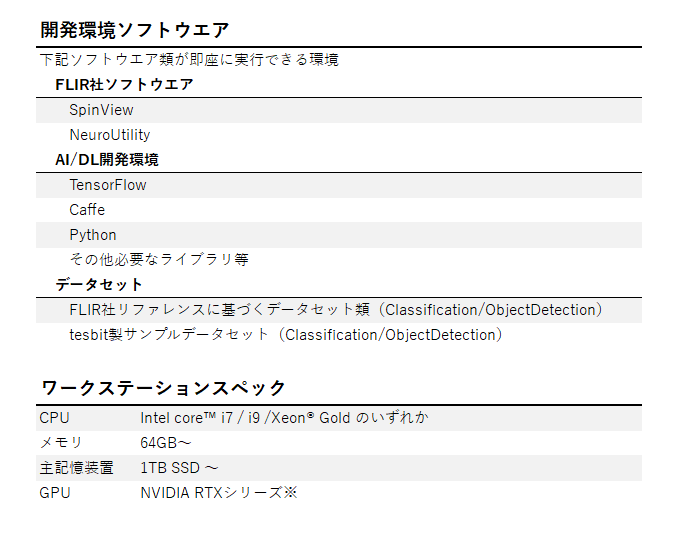
開発環境は、お客様が即座にFireflyDLを
お使いいただける環境を整えて出荷いたします。
 詳しくはお問い合わせください。
詳しくはお問い合わせください。
| お問い合わせ(AI用) | カタログ |

各種セミナーをご用意しています。
受講料や詳しい内容についてはお問い合わせください。
初級:Firefly DL 使い方セミナー
Firefly DLの基礎的な使い方を中心に覚えていただくセミナーとなります。
受講時間2日間(計8時間程度)
講義内容として、
・PC側ソフトウエアの概要説明 ~WSLから各種ツールについて~
・WSLの使い方 ~Linuxコマンドの説明~
・構成ファイルの説明
・FLIRサポートサイトに基づく動作確認
・TensorFlowによるClassificationの使い方
・CaffeによるObjectDetectionの使い方
・データセットの作り方(弊社で用意した画像での作成)
以上となります。
 |
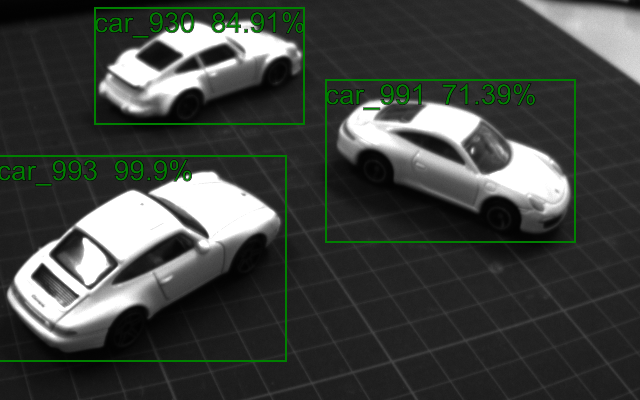 |
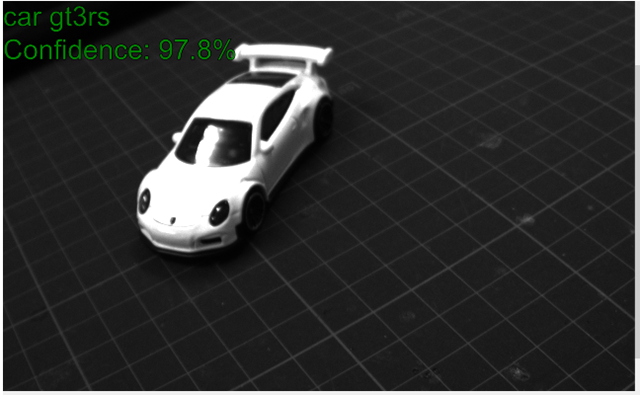
| Classificationサンプル | ObjectDetectionサンプル |
中級:実践Classification:お客様撮影の画像で実践
Classificationをお客様撮影の画像をもとにデータセットの構築から
実際の動作確認・学習のチューニングまでを講習します。
受講時間3日間(計12時間程度)
講義内容として、
・Classificationとは
・必要な画像とは ~Garbage In, Garbage Out~
・学習の考え方 ~何をもって学習したと考えるか~
・実際に撮影
・データセットの作成
・学習の実行
・実機での動作検証
以上となります。
上級:実践ObjectDetection:お客様撮影の画像で実践
ObjectDetectionをお客様撮影の画像をもとにデータセットの構築から
実際の動作確認・学習のチューニングまでを講習します。
受講時間6日間(計24時間程度)
講義内容として、
・ObjectDetectionとは
・実際に撮影
・アノテーションの実行
・データセットの作成
・学習の実行
・実機での動作検証
以上となります。
| お問い合わせ(AI用) | カタログ |

運用フェーズに移行した外観検査装置で検査を行っていても、
検査漏れが発生してしまう場合があります。
AIの画像認識技術を利用し、対象ワークをダブルチェックすることで
検査漏れを防ぐことを目的としたのが本システムです。
これはローコストのFireflyDLだからこそ、可能なシステムです。
FireflyDLをClassificationで実行し、NG品検出時に信号を出力させるなど、
既存の装置に合わせてカスタマイズも可能です。
運用面においては、
・お客様にて画像を管理調整・学習の最適化を行っていただくエコノミープラン
・弊社にて学習の最適化などを行うフルサポートプラン
上記2種をご用意しております。
詳しくはお問い合わせください。
| お問い合わせ(AI用) | カタログ |

FireflyDLを用いた外観検査システムです。
AIの画像認識技術を利用し、外観上の欠陥や異常を検出するシステムです。
検査可能な代表例として
・傷検査
・バリ検査
・形状検査(明確に形状に異常が発生するもの)
・パターンマッチング検査にて過去の実績があるもの
など
様々なアプリケーションに対応可能です。
検査漏れ防止システムとの違いは、
データセットの構築方法や周辺機器の違いとなります。
詳しくはお問い合わせください。
| お問い合わせ(AI用) | カタログ |

主に手詰め作業時の入り数ミスを監視する、
個装数をカウントし検査判定するシステムです。
毎秒1箱以上の高速でも応答し判定することが可能です。
運用面においても多品種に対応するシステムで、
簡単な操作で対応品種を切り替えることが可能です。
本システムは、高速処理能力が要求されますので
PC(ワークステーション)GPUベースのシステムとなります。
詳しくはお問い合わせください。
| お問い合わせ(AI用) | カタログ |



|
|
| Classificationサンプル | ObjectDetectionサンプル |


このファームウェアはTSZC-06のみご利用可能です。
TSZC-04,04S,05,05Sをご利用のお客様はご利用できません。
※TSZC-06P、TSZC-06AFは対象外となります。
※TSZC-06以外のお客様は行わないでください。(動作しません)
TSZC-06以外に更新を行い損害が発生した場合、
弊社はいかなる責任も負いかねますので、あらかじめご了承ください。
2022年11月15日発表
◆アップデート内容について
TSZC-06S公開
◆対策内容
ファームウエアバージョン:2.0.2.1
ファームウエアのアップデートについて
ファームウエアのアップデートは、弊社製Windowsソフトを使用し更新を行います。
Windows7以降のPCにて動作しますが、
Windows7の場合dotnet4.0以降がインストールされている必要があります。
1.更新ツールのダウンロード
以下のリンクから更新ソフトとファームウエアが圧縮されたファイルを
ダウンロードしてください。
FWU ver2022
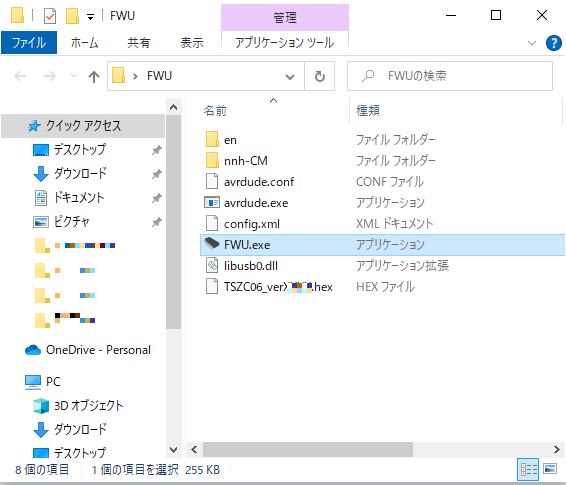
2.ダウンロード後、ファイルを解凍しフォルダを開いてください。
3.TSZC-06をPCと接続状態にしてください。
※TSZC-06のドライバを適用したPCにて作業を行ってください。
4.フォルダ内「FWU.exe」を実行してください。
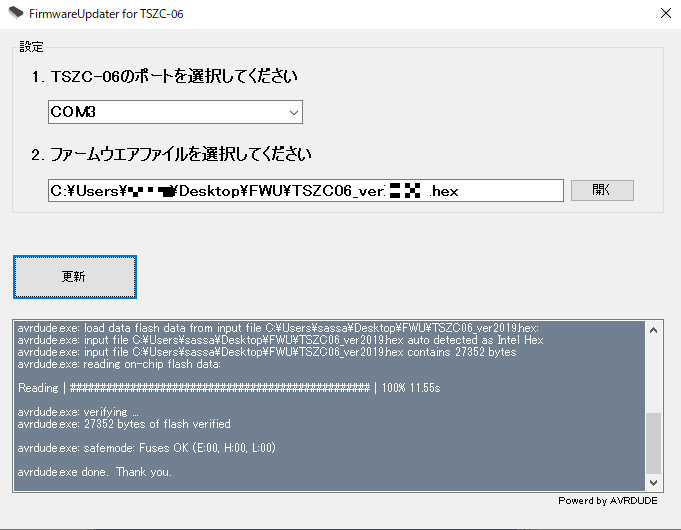
実行後、以下の様な画面が表示されます。

5.画面に従い、TSZC-06の接続ポートを選択してください。
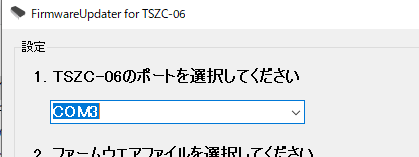
※写真はCOM3の場合です
6.ファームウエアファイル(拡張子がhex)ファイルを選択します。
[開く]ボタンを押して、ファイル選択ダイアログを表示させてください。
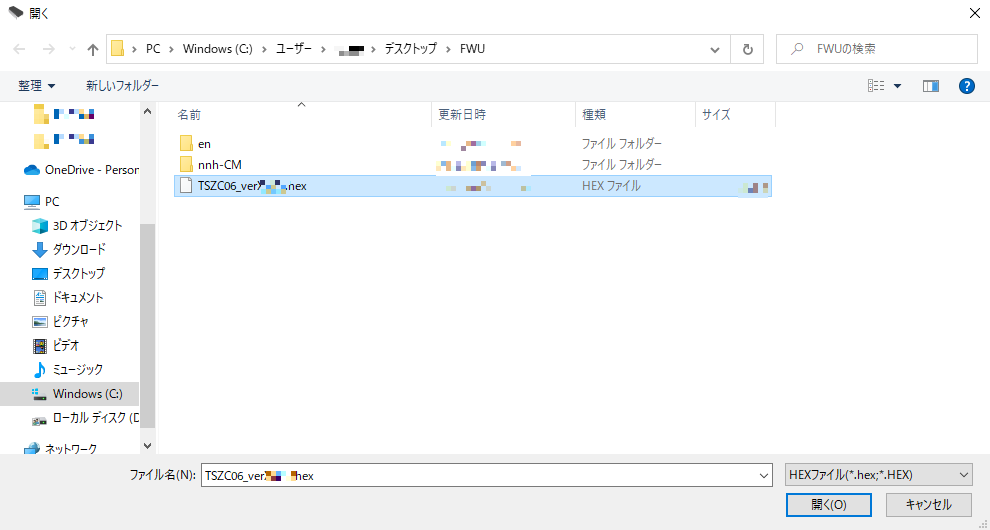
ソフトウエアを実行しているフォルダが、初期状態で表示されます。
その中に、「TSZC06_verXXXX.hex」(XXXXはバージョン番号=4桁の数字)
というファイルが有りますので
そのファイルを選び、[開くボタン]を押してください。
7.準備が整いましたので、更新(書き込み)を行います。
画面の[更新]ボタンを押してください。
実行すると、画面下段のグレー部分に白文字で情報が表示されます。
8.しばらくお待ちいただくと、以下の様な完了を伝える
メッセージが表示されます。
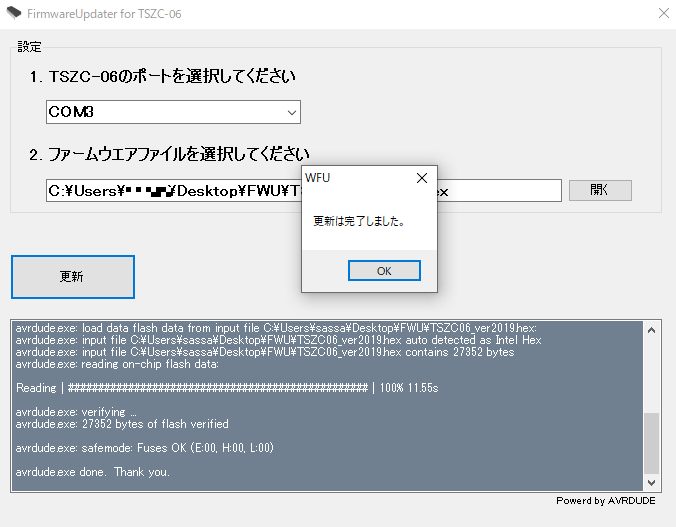
以上で作業は完了です。
※更新時にエラーを伝えるメッセージが表示された場合、
お手数ですが、エラー内容を弊社までお伝えください。

このページの対象のお客様
・TSZCを外観検査装置などで使用するお客様
・TSZCを精度よく動作させたいお客様
注意事項
・組み合わせるレンズによっては以下の内容と異なる結果が生じる場合もあります。
その際には、実際の動作を重視してプログラミングしていただけると幸いです。
TSZCシリーズをお買い求めいただきありがとうございます。
TSZCシリーズを精度良く動かすためのノウハウを一部公開いたしますので
ご参考いただけると幸いです。
はじめに
TSZCシリーズはTSZC-05以降のモデルから、moveコマンドを使用して
任意位置への移動が可能となっていますが、若干のずれが生じます。
これは、レンズ内のギヤのバックラッシュや、イナーシャが影響しています。
mv_thdコマンドにて、ズレの許容量を調整することが可能ですが、
実際に操作した後に、read_aコマンドなどで位置情報を取得した際に
mv_thdで指定した閾値以上のずれが生じる場合があります。
弊社では、自社製外観検査装置の多品種に対応したシステム用として
このTSZCシリーズを10年以上使用しています。
そこで得られた、ずれを極力小さくする手法をご紹介いたします。
どんな時にずれが生じるか ~ その対策方法 ~
~垂直設置での使用~
ずれが一番生じやすいのは、レンズを垂直設置されているお客様です。
これは、レンズ内ギヤのバックラッシュが主な原因です。
フォーカス・ズームはレンズ自体が移動しますので、
確実に重力の影響を受けます。
レンズを移動させる場合、弊社では以下のルールを定めて運用しています。
1.レンズの移動は一方通行
レンズを目的位置にセットさせる場合、必ず下から上へ移動させます。
例
条件:レンズを下向きにセット
ズーム値0が下側、ズーム値1000が上側の場合
ズーム値:500にセットされているレンズを、ズーム値300にする場合
1.一旦レンズ位置を、300-50=250 ズーム値250にセットします。
(50の値は、弊社での社内値です。20~50が最適と考えます。)
2.一旦read_aなどのコマンドで現状の値を取得します。
(特に必要ありませんが、ワンテンポ待機したほうが良好な結果が得られます。)
3.目的とするズーム値300へmoveコマンドでセットします。
2.移動速度の最適化
レンズ型番によって、移動速度が異なります。
レンズが移動する最小の速度値+5程度の速度を設定することによって
レンズが移動しすぎる等の無駄な動作を軽減することが可能です。
(mv_spdコマンド)
~高速移動を行う場合~
レンズを高速移動させたいお客様も、ずれが生じる可能性があります。
これはズーム・フォーカス機構部のイナーシャによる場合があります。
弊社では以下の方法で対応しています。
レンズの移動を2段階にし、移動速度を切り替える
レンズを移動させる際に、高速移動と低速移動に移動を分割します。
例
1.目標値から20程度手前まではmv_spdコマンドの値を大きくとって高速移動させます。
2.高速移動終了後、mv_spdの値を小さくし、移動速度を遅くします。
3.目標値へmoveコマンドで移動させます。
まとめ
TSZCシリーズが動作させているズームレンズは、重力や慣性の影響を受ける場合があります。
その点を踏まえて頂いてプログラミングしていただけると、精度よく動作させることが可能
です。
弊社では、独自開発の画像処理ソフトウエアを用いています。
そのため、お客様のご要望に沿ったシステムをご提供することが可能です。
Tシリーズ向けソフトウエア
ワークステーションのマルチコアを十分に生かすよう設計された、ソフトウエアを
ご提供しております。
 事例
事例
トランス外観検査ソフトウエア
トランスの外観6面を撮影し、
外観検査+製造番号の読取
(文字連接:文字が重なっていても可読)
などを行っています。
Sシリーズ向けソフトウエア
Tシリーズほどのスペックは必要ない検査において使用するソフトウエアが、Sシリーズ向け
ソフトウエアとなります。
得意とする検査機能(T/Sシリーズ共通)
・傷、異常点検出機能
独自アルゴリズムで異常点を数値化し検出することが可能です。
・円形(円筒状検査)
円形形状をすばやくスキャンし検査を行うことが可能です。
マスクをする処理ではないので、繊維方向など模様の存在する表面の検査も可能です。
・形状の数学的アプローチ
認識した形状を、ただ単純に大きさ等で合否判定せず、
総合的に判断する機能です。
(例:溶接部の形状を、さまざまな条件を加味し合否判定を行うなど)
仕様
・検査内容の組み換えが可能
・設定等のパラメータの変更が簡単
・トレーサビリティ対応
・タッチパネル対応UI
・自己診断機能
オプション
・電動ズームレンズとの連携:手動でのレンズ調整が不要
弊社ズームレンズコントローラとの組み合わせによって、多品種少量生産などといった
検査対象の頻繁な切替にも対応が可能です。
・他社製画像処理ライブラリの組み込み:既存設備の強化などにも
例:Matrox MILなどといった他社画像処理ライブラリの組み込みも
弊社ライブラリ側にて、変換機能等を有しておりますので組み込みが可能です。