このページはお客様専用ページです。
ページの閲覧には専用パスワードが必要となります。
パスワードはご連絡しておりますパスワードです。
パスワードをお忘れになられた場合、担当者までご連絡ください。
This page is USER ONLY.
Browse the page will require private password.
If you have forgotten your password, please contact.
Password:
作成者別アーカイブ: tkoizumi
特定顧客向けサポートページ(2022_AUP)
このページはお客様専用ページです。
ページの閲覧には専用パスワードが必要となります。
パスワードはご連絡しておりますパスワードです。
パスワードをお忘れになられた場合、担当者までご連絡ください。
This page is USER ONLY.
Browse the page will require private password.
If you have forgotten your password, please contact.
Password:
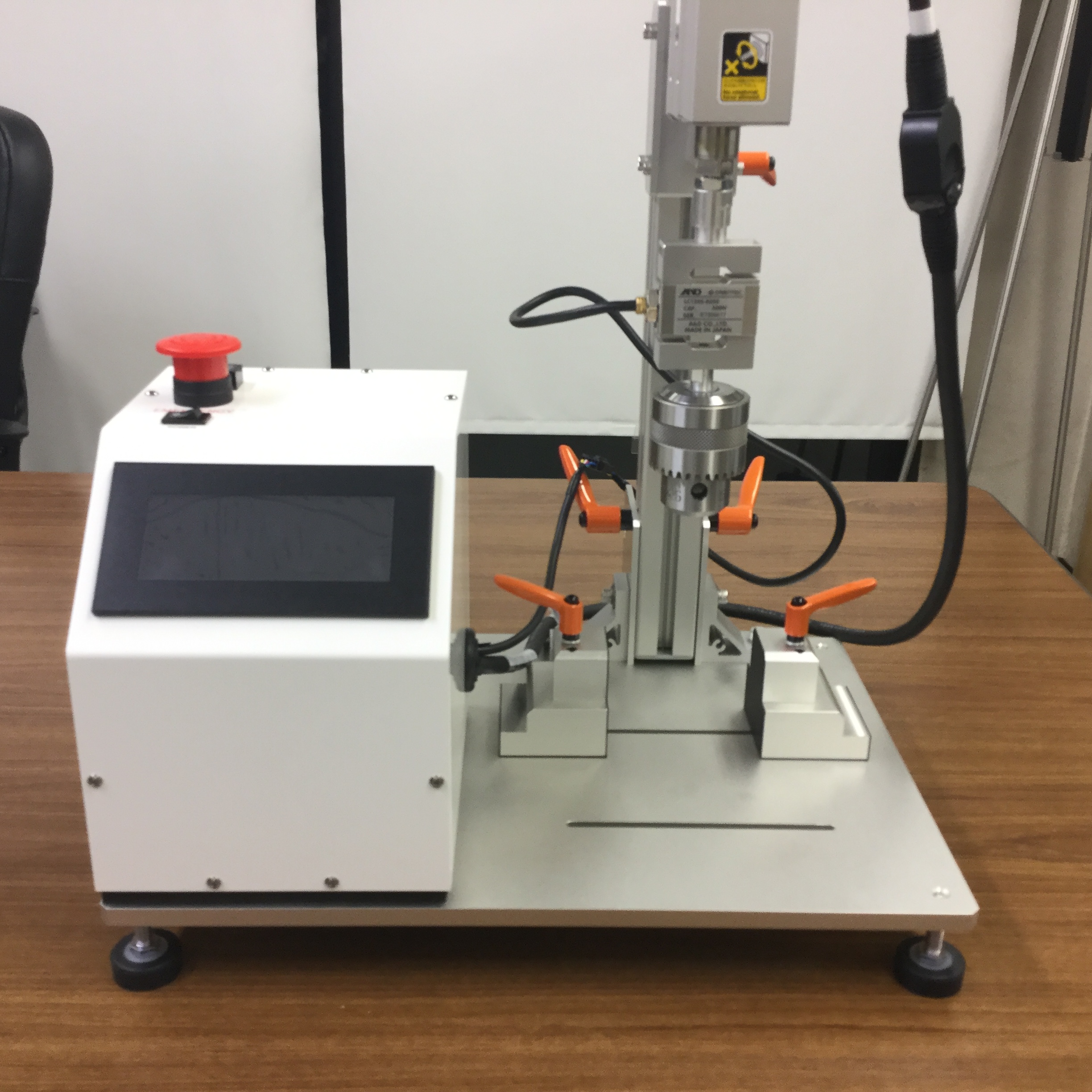
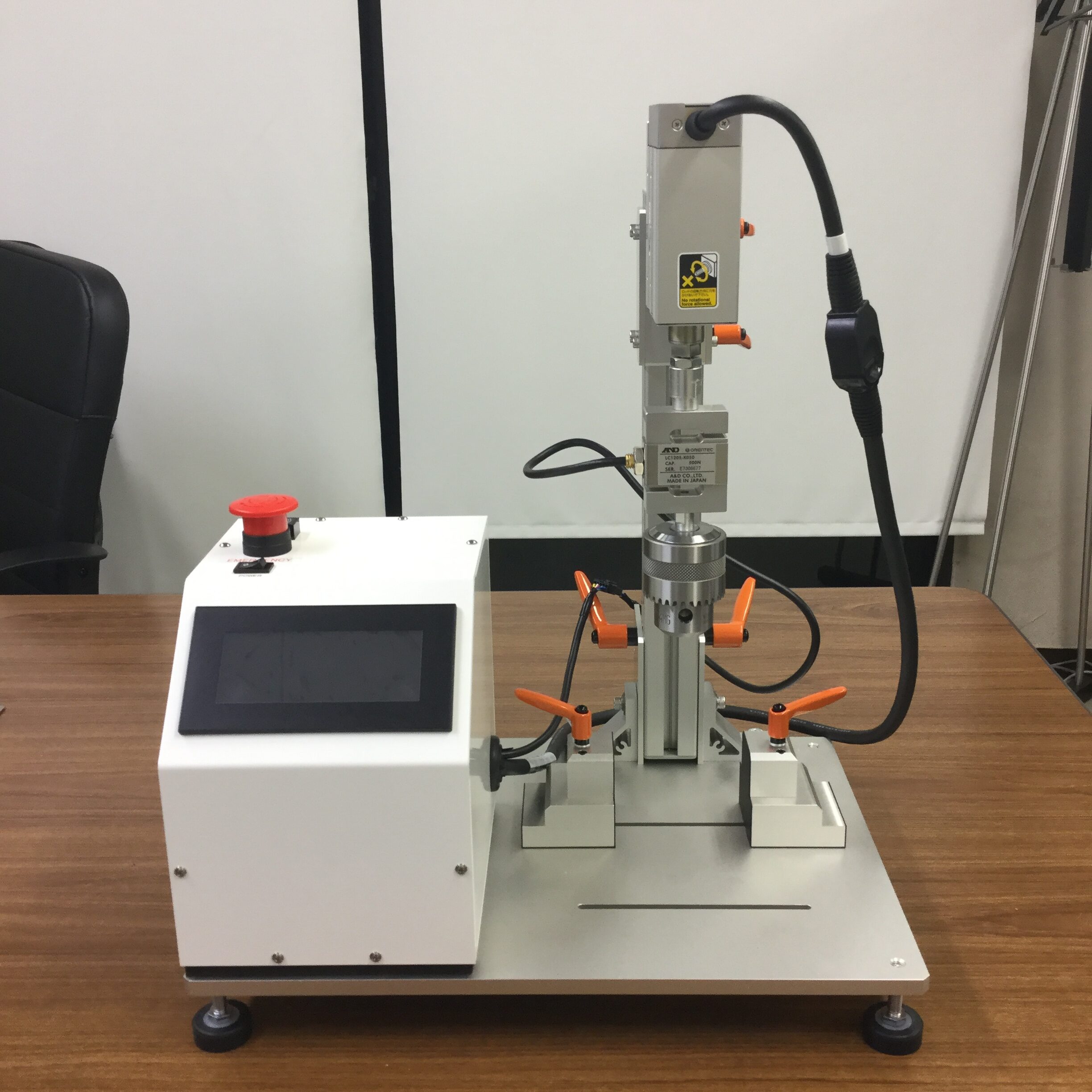
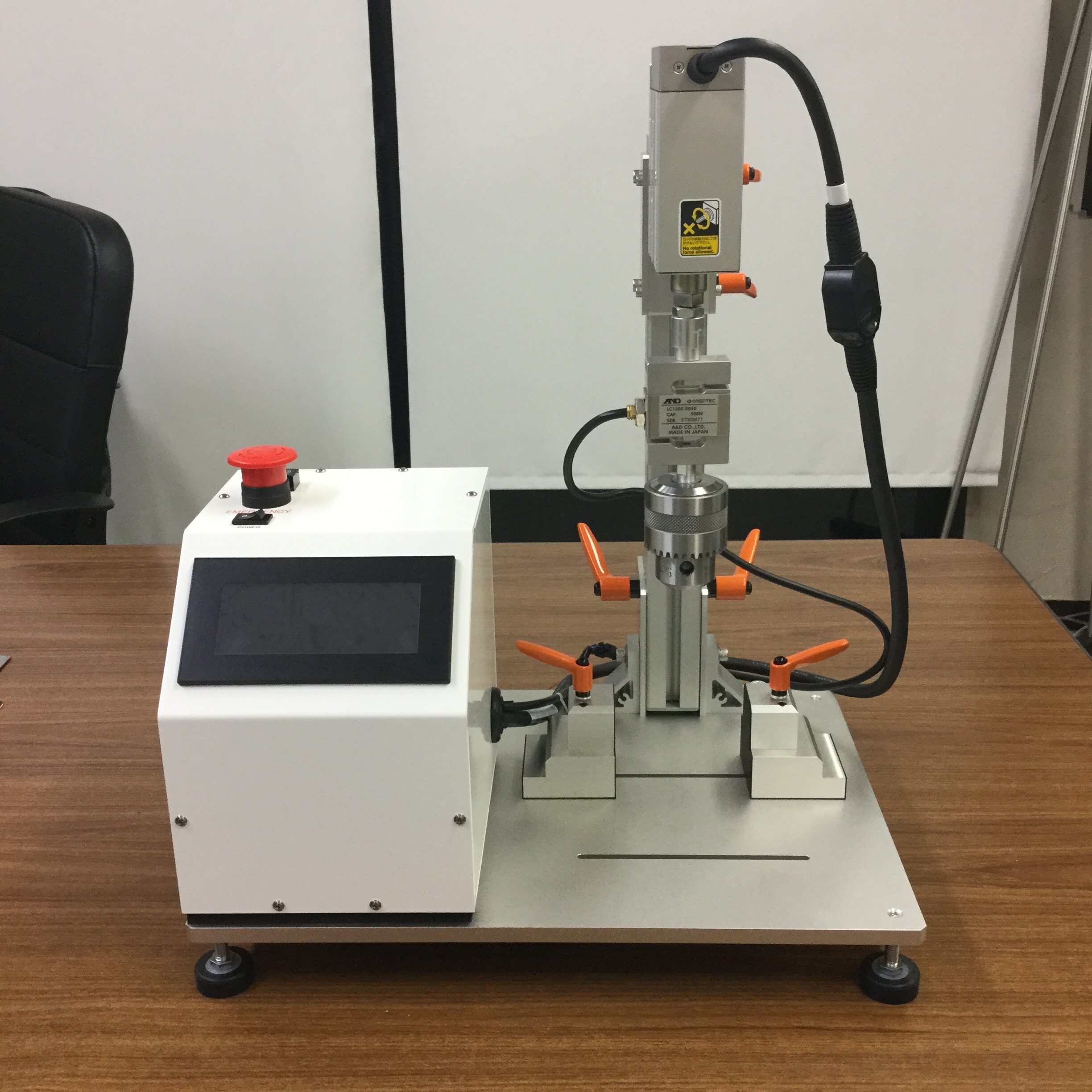
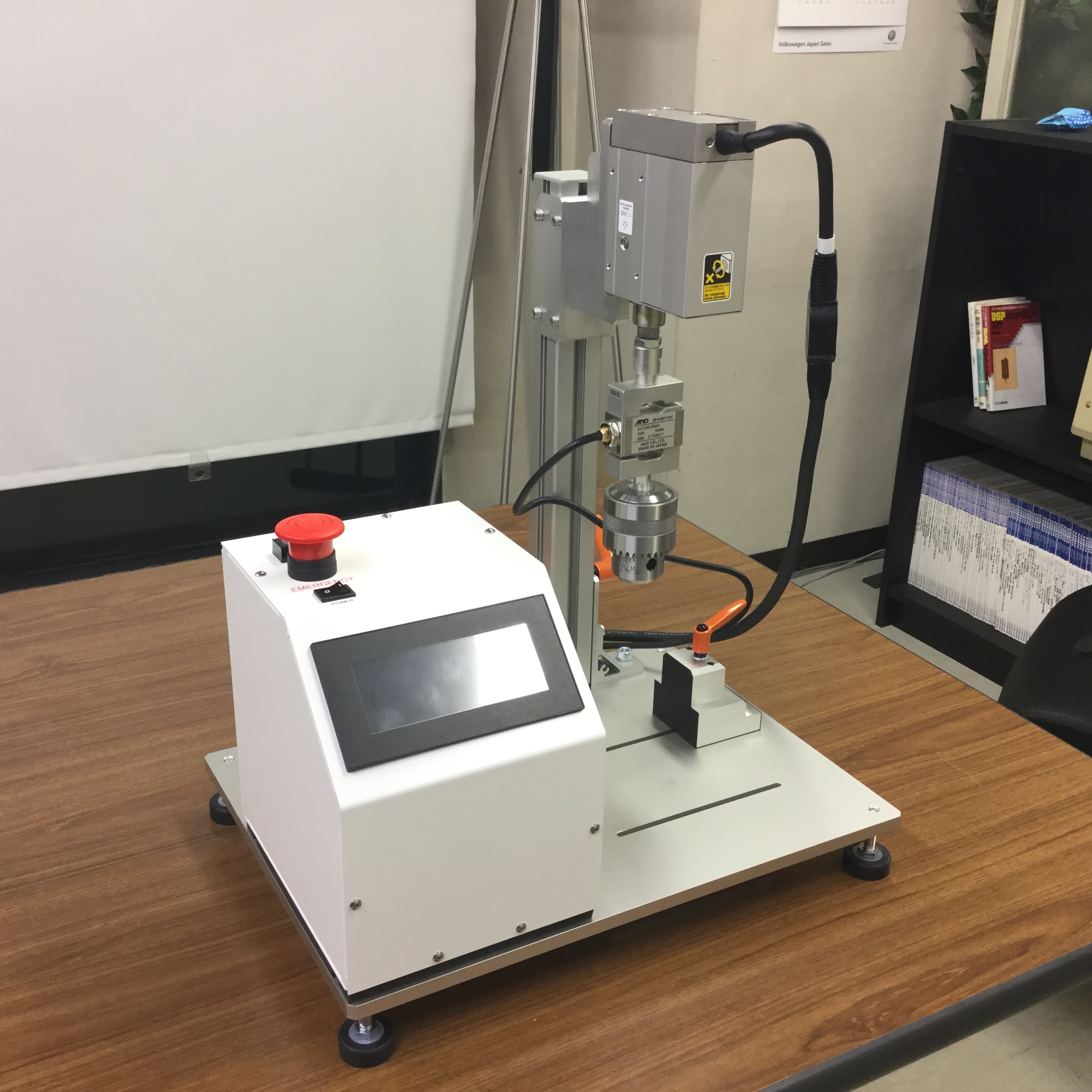
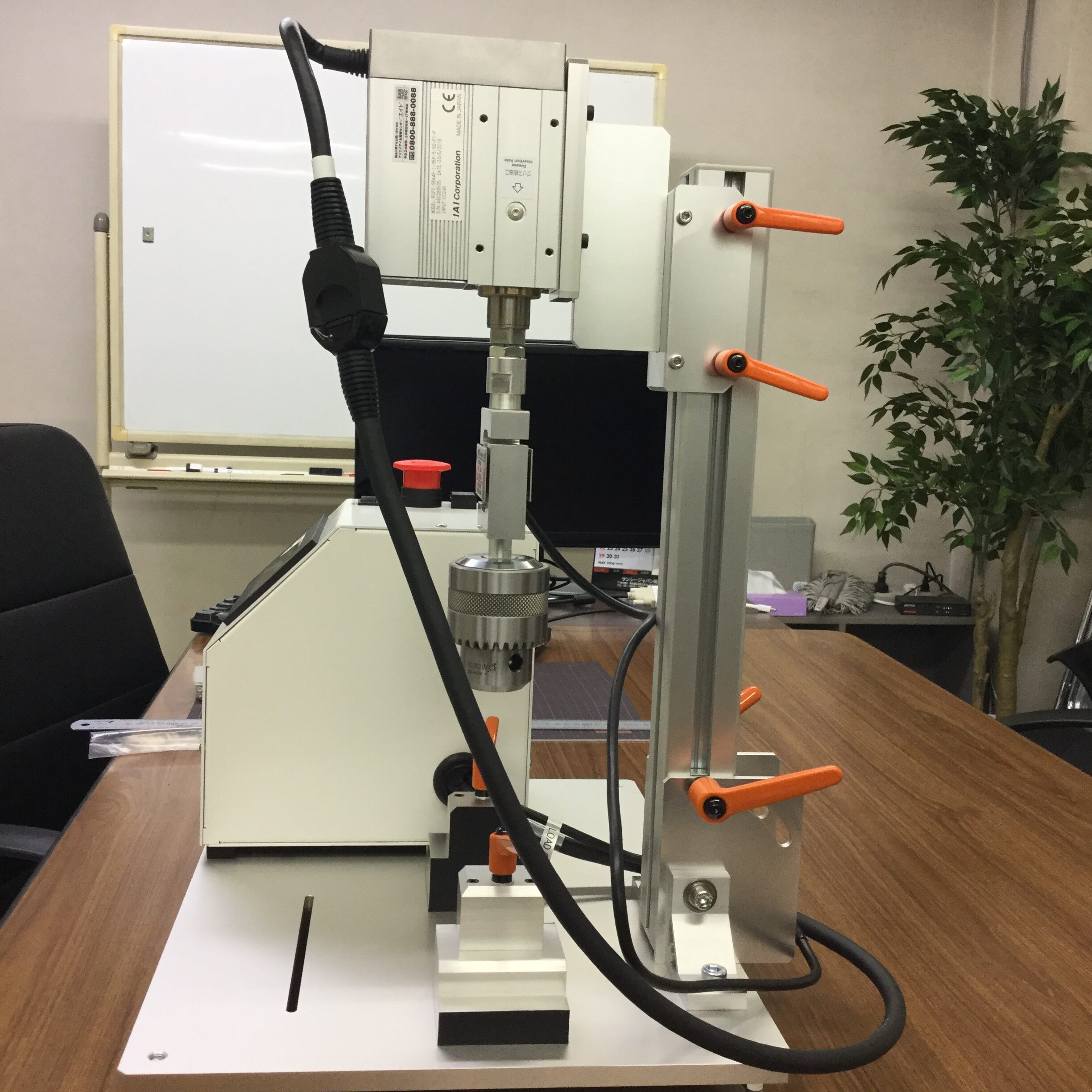
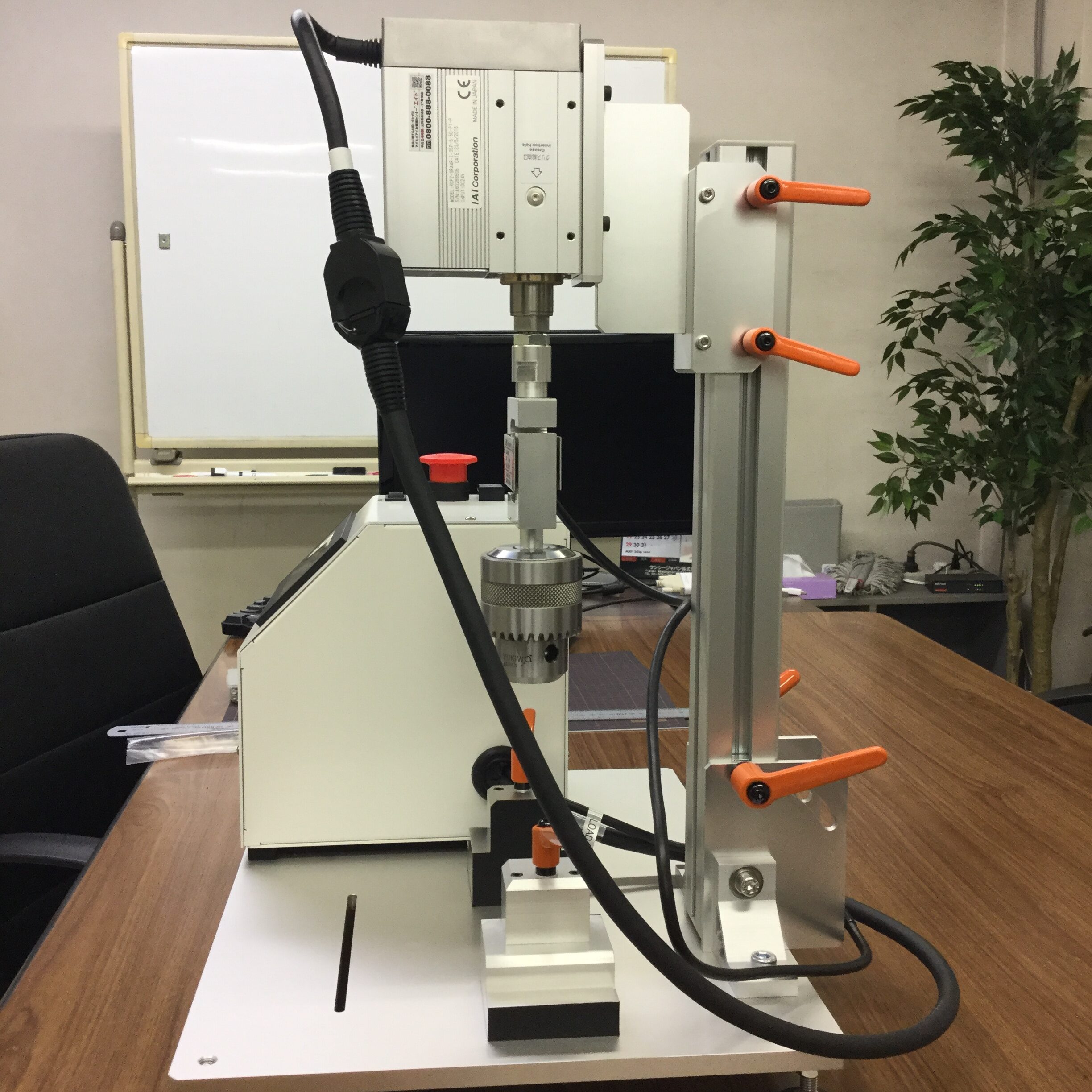
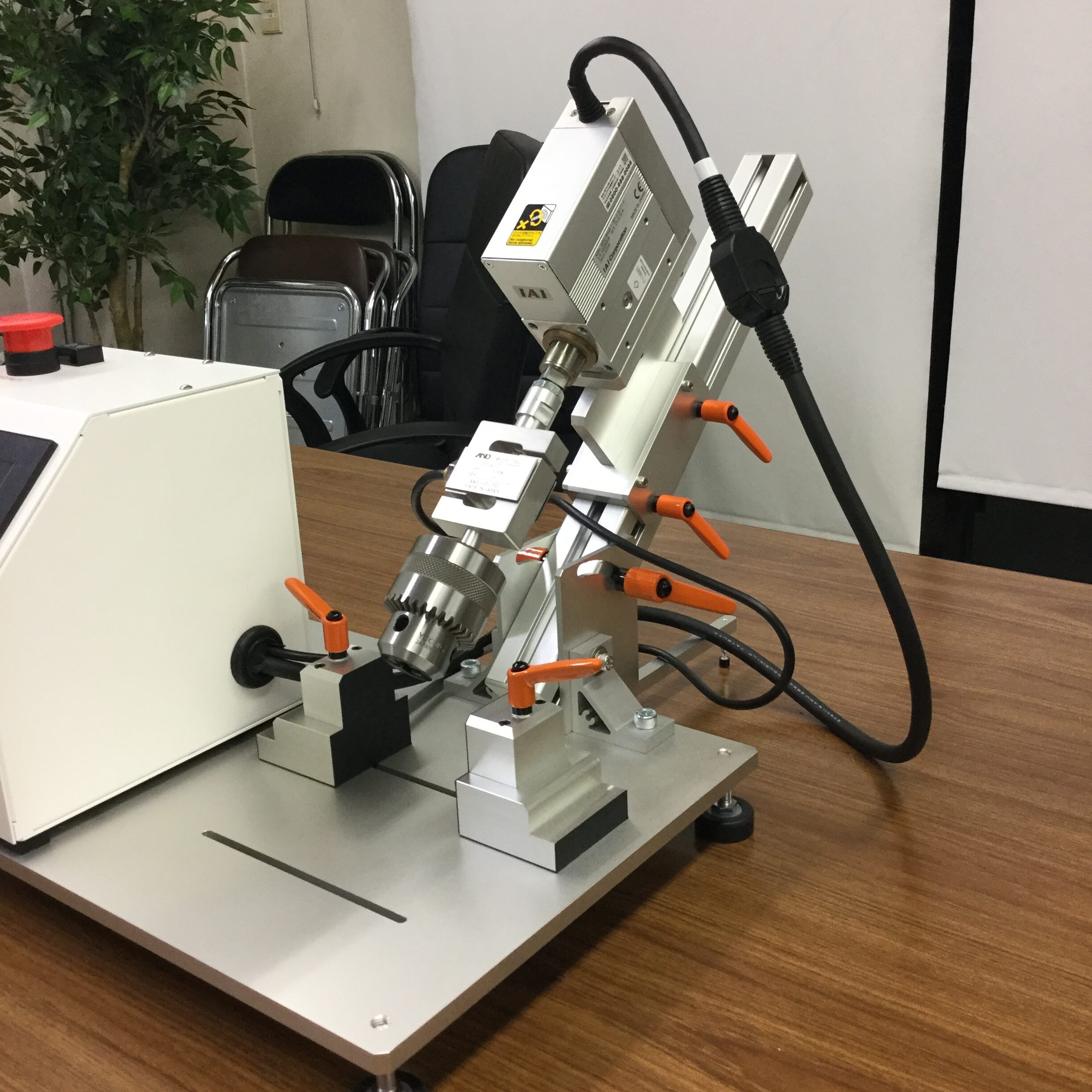
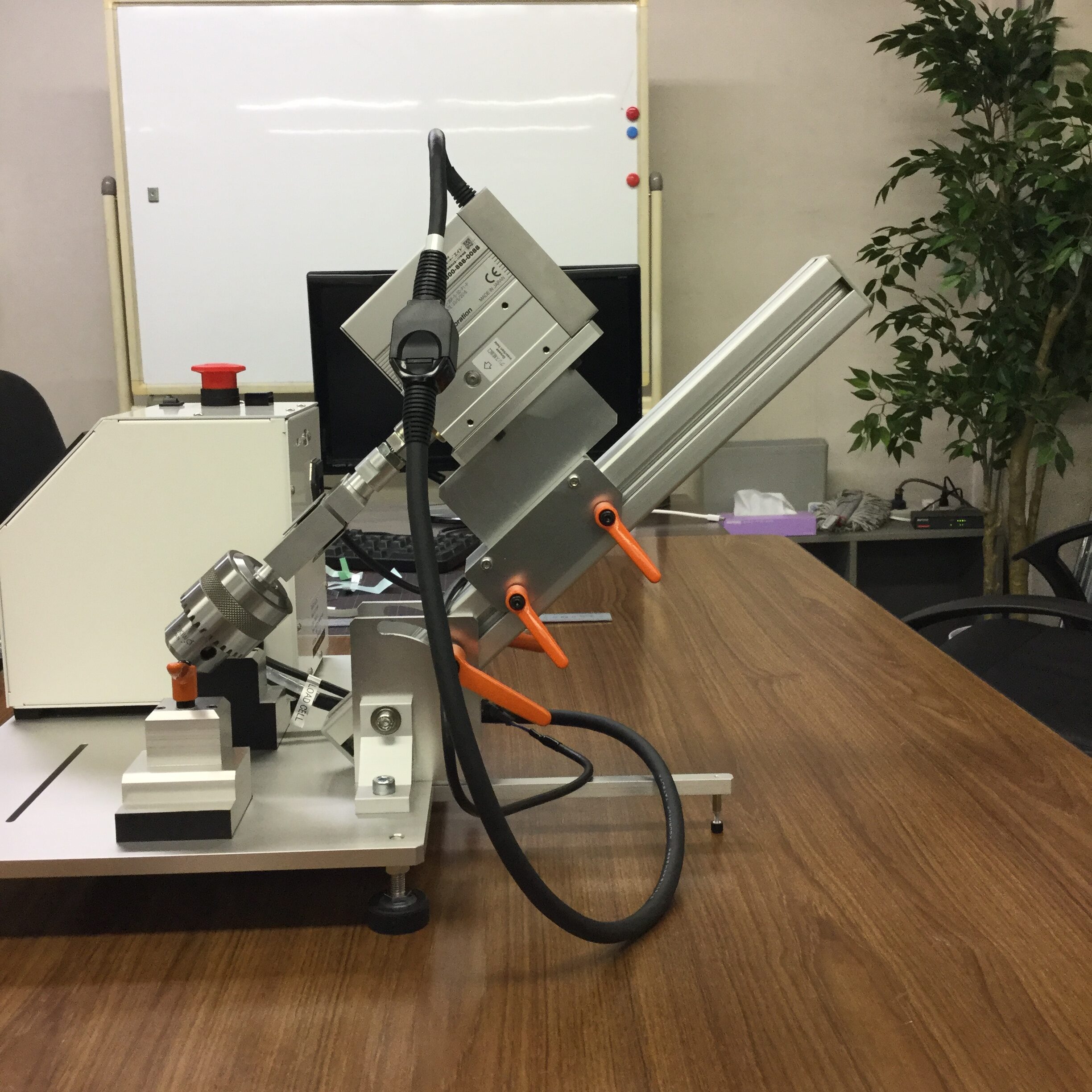
PB827 商談用資料
取扱説明書
押しボタン検査装置取扱説明書.pdf
製品写真






特定顧客向けサポートページ(2020_nr)
このページはお客様専用ページです。
ページの閲覧には専用パスワードが必要となります。
パスワードはご連絡しておりますパスワードです。
パスワードをお忘れになられた場合、担当者までご連絡ください。
This page is USER ONLY.
Browse the page will require private password.
If you have forgotten your password, please contact.
Password:
開発環境セット販売
 Firefly DLの開発環境構築が分からない。
Firefly DLの開発環境構築が分からない。
Firefly DLで最初から結果を出したい。
そんな方たちに向けて、tesbitがすべてをセットにした
開発環境を提供いたします。
弊社ではお客様に安定した運用をしていただくために、
SuperMicro社ワークステーションを、
弊社スペックで構築し提供しています。
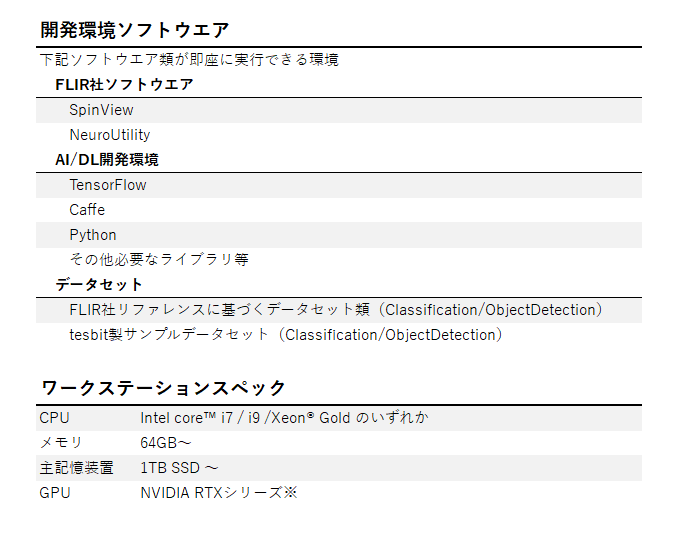
開発環境は、お客様が即座にFireflyDLを
お使いいただける環境を整えて出荷いたします。
 詳しくはお問い合わせください。
詳しくはお問い合わせください。
| お問い合わせ(AI用) | カタログ |
セミナーのご案内

各種セミナーをご用意しています。
受講料や詳しい内容についてはお問い合わせください。
初級:Firefly DL 使い方セミナー
Firefly DLの基礎的な使い方を中心に覚えていただくセミナーとなります。
受講時間2日間(計8時間程度)
講義内容として、
・PC側ソフトウエアの概要説明 ~WSLから各種ツールについて~
・WSLの使い方 ~Linuxコマンドの説明~
・構成ファイルの説明
・FLIRサポートサイトに基づく動作確認
・TensorFlowによるClassificationの使い方
・CaffeによるObjectDetectionの使い方
・データセットの作り方(弊社で用意した画像での作成)
以上となります。
 |
 |
| Classificationサンプル | ObjectDetectionサンプル |
中級:実践Classification:お客様撮影の画像で実践
Classificationをお客様撮影の画像をもとにデータセットの構築から
実際の動作確認・学習のチューニングまでを講習します。
受講時間3日間(計12時間程度)
講義内容として、
・Classificationとは
・必要な画像とは ~Garbage In, Garbage Out~
・学習の考え方 ~何をもって学習したと考えるか~
・実際に撮影
・データセットの作成
・学習の実行
・実機での動作検証
以上となります。
上級:実践ObjectDetection:お客様撮影の画像で実践
ObjectDetectionをお客様撮影の画像をもとにデータセットの構築から
実際の動作確認・学習のチューニングまでを講習します。
受講時間6日間(計24時間程度)
講義内容として、
・ObjectDetectionとは
・実際に撮影
・アノテーションの実行
・データセットの作成
・学習の実行
・実機での動作検証
以上となります。
| お問い合わせ(AI用) | カタログ |
tesbitのAI製品

運用フェーズに移行した外観検査装置で検査を行っていても、
検査漏れが発生してしまう場合があります。
AIの画像認識技術を利用し、対象ワークをダブルチェックすることで
検査漏れを防ぐことを目的としたのが本システムです。
これはローコストのFireflyDLだからこそ、可能なシステムです。
FireflyDLをClassificationで実行し、NG品検出時に信号を出力させるなど、
既存の装置に合わせてカスタマイズも可能です。
運用面においては、
・お客様にて画像を管理調整・学習の最適化を行っていただくエコノミープラン
・弊社にて学習の最適化などを行うフルサポートプラン
上記2種をご用意しております。
詳しくはお問い合わせください。
| お問い合わせ(AI用) | カタログ |

FireflyDLを用いた外観検査システムです。
AIの画像認識技術を利用し、外観上の欠陥や異常を検出するシステムです。
検査可能な代表例として
・傷検査
・バリ検査
・形状検査(明確に形状に異常が発生するもの)
・パターンマッチング検査にて過去の実績があるもの
など
様々なアプリケーションに対応可能です。
検査漏れ防止システムとの違いは、
データセットの構築方法や周辺機器の違いとなります。
詳しくはお問い合わせください。
| お問い合わせ(AI用) | カタログ |

主に手詰め作業時の入り数ミスを監視する、
個装数をカウントし検査判定するシステムです。
毎秒1箱以上の高速でも応答し判定することが可能です。
運用面においても多品種に対応するシステムで、
簡単な操作で対応品種を切り替えることが可能です。
本システムは、高速処理能力が要求されますので
PC(ワークステーション)GPUベースのシステムとなります。
詳しくはお問い合わせください。
| お問い合わせ(AI用) | カタログ |
Firefly DL

簡単にAI。
必要なのは、
FireflyDL・PC・検査対象ワーク。
プログラミングの必要はありません。
対象ワークの撮影は面倒ですが…
動かすだけならプログラムはまったく作りません。
TensorFlowやCaffeを1度でも使ったことがあるなら、動かすことはできると思います。
知識のない方でも、弊社のセミナーを受講していただければ簡単に使うことができます。
ただし、結果を出すには”コツ”が必要です。
サポートいたします。

スタンドアロン。
FireflyDLに作成したニューラルネットワークを書き込めば
単体動作可能です。
ネットワーク接続の必要はありません。
既存のAI画像認識システムのように常時インターネット接続を含んだシステム構築の必要はありません。
また、1検査(検出・認識)に対する従量課金もありません。
製造現場でネットにつなぐことができなくても大丈夫。
設備との組み合わせの条件さえ整えば、PCレスでも動作可能です。
(FireflyDLは、認識したクラスに対して信号出力が可能です。)

ローコスト。
FireflyDLとレンズ・照明・ケーブルで?万円から。(ひとけた万円)
初期投資としてニューラルネットワーク作成PCも必要です。
速いPCを使うと立ち上げもスムーズになります。
既存カメラとの置き換えも可能です。その場合、既存照明を用いれば更にコストを下げることは可能です。
アドバイスとして、ニューラルネットワークを作成するPCは、予算を多めにお願いします。
結果が出るまで何週間もPCを動かし続けたくは無いでしょうから。
複数ライン有るような製造ラインの場合、最高のスケールメリットが得られる可能性があります。
※価格についてはお問い合わせください。
補足説明
◆FireflyDLについて
FireflyDLは、カメラ単体でClassification(分類)やObjectDetection(物体検出)が可能なカメラです。
PCにて学習させた、ニューラルネットワークをカメラに展開し実行することが可能です。
◆使用できるニューラルネットワークについて
基本的にはTensorFlowを用いたClassification(分類:映像上で最も近似しているものを指し示す)、
Caffeを用いたObjectDetection(物体検出:映像上の複数の物体を認識)の2点となります。
※学習結果のニューラルネットワークファイルが、22MBを超過する場合動作しない可能性があります。
◆クラウド型システムとの違いについて
クラウド型AI認識・検出システムと比較した場合、学習時間に大きな差が出ます。
クラウド型の最大のメリットはスーパーコンピューターレベルのワークステーションにて
高速に学習を行えることです。
しかしながら製造現場では、製品の写真の外部送信は勿論のこと、製品の情報は絶対に漏らしたくはありません。
FireflyDLなら、社内に設置した学習用PCにて学習させれば良いですから、その点の心配はありません。
◆デメリットについて
FireflyDLに内蔵されている推論エンジンはインテル® Movidius™ Visual Processing Unit(VPU)です。
小型の組み込み用途のVPUとなります。
GPUやFPGAと比較した場合、スペック上の性能では劣ります。
しかしながら、用途によっては十分な性能であると考え、また、運用方法を創意工夫すれば実用に耐えられる
可能性が十分にあると弊社では考えています。
◆価格について
本商品は輸入商品です。為替レートや輸送費の変動で価格が変動する点をご了承ください。
本ページ内の「?万円(ひとけた万円)」は最小構成時の価格となります。
はじめてお使いになるお客様や、画像処理についてご不安なお客様は、
サポート購入やセミナーを受講していただく場合がございます。
ご購入後の、追加サポートのご購入やセミナー受講も可能ですので、その際はお問い合わせください。
製品の性質上、お客様都合による返品はお断りしております。
また、弊社判断にてサポート購入やセミナー受講をしていただけないお客様には、
販売を行わない場合がございます。ご了承ください。
弊社のサンプル
お客様の製品ではいろいろと問題がありますので、
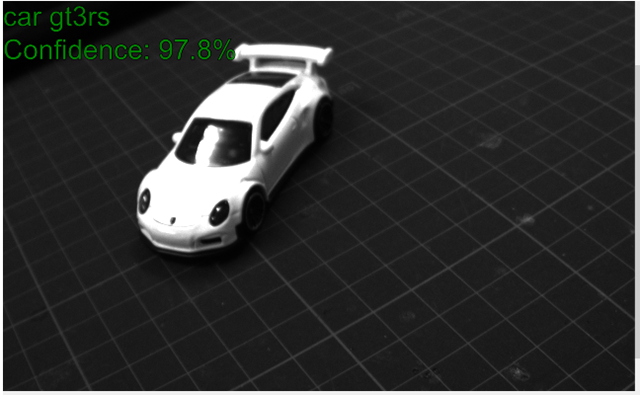
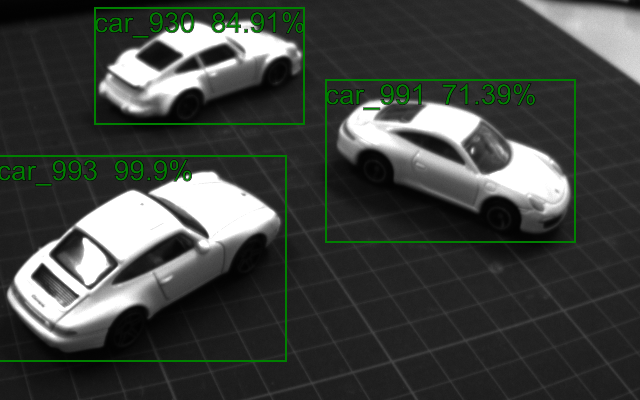
ここではミニカーを4種類用意し、ClassificationとObjectDetectionを行いました。
ミニカーは自動車に詳しくない方が見たら見分けがつかないスポーツカーのミニカー4台です。
FireflyDLにて、各車種20枚程度、様々な角度から撮影し、学習用の画像としました。
アノテーションと呼ばれる画像に情報を付加し、データベースを構築する「Dataset」の構築まで約2時間、
その後PCにて学習を行わせました。
Classificationは1時間程度、ObjectDetectionは3時間程度学習を行わせた結果が下写真の結果です。
予想よりも少ない立ち上げ時間では?
弊社では、FireflyDLやDeepLearningのノウハウを保有しています。たくさんの失敗もしました。
その知識を製造現場などでお使いいただけると幸いです。
|
|
| Classificationサンプル | ObjectDetectionサンプル |
上記写真はFirefly DLの実行結果です。
本サイトでは、簡潔に表記するためDL:DeepLearningを一部AIとの表記をしています。ご了承ください。
本サイト表記の「スタンドアロン」は開発中や実行中の状態がスタンドアロンという点を示しています。開発環境構築の際にはネット接続と弊社並びに各社サイトからのダウンロード等が必要になるい場合があります。
FLIR®並びにFirefly Firefly DLは、フリアーシステムズ(FLIR®Systems,imc.)の登録商標です。
Firefly DLの写真並びにFLIR®ロゴはフリアーシステムズより許諾を受けて掲載しています。
また、それ以外の写真についてはテスビット保有の写真となります。
AI/DL 関連製品


本サイトでは、簡潔に表記するためDL:DeepLearningを一部AIとの表記をしています。ご了承ください。
本サイト表記の「スタンドアロン」は開発中や実行中の状態がスタンドアロンという点を示しています。開発環境構築の際にはネット接続と弊社並びに各社サイトからのダウンロード等が必要になるい場合があります。
FLIR®並びにFirefly Firefly DLは、フリアーシステムズ(FLIR®Systems,imc.)の登録商標です。
Firefly DLの写真並びにFLIR®ロゴはフリアーシステムズより許諾を受けて掲載しています。
また、それ以外の写真についてはテスビット保有の写真となります。
特定顧客向けサポートページ (2020_sc)
このページはお客様専用ページです。
ページの閲覧には専用パスワードが必要となります。
パスワードはご連絡しておりますパスワードです。
パスワードをお忘れになられた場合、担当者までご連絡ください。
This page is USER ONLY.
Browse the page will require private password.
If you have forgotten your password, please contact.
Password: